Localisation
de robots
Cette page est une ancienne page de mon site, je m'excuse
pour son graphisme non cohérent par rapport au graphisme du
reste du site. Cependant, je pense que tout y est bien
lisible.Les slides de la formation que je donnerai à Centrale Marseille en Janvier 2020 sont juste en bas de cette page.
Définition d'un problème de
localisation
En robotique on est face à un problème de localisation lorsque nous désirons connaître les coordonnées d'un agent R dans l'espace ou le plan de travail (que nous appellerons référentiel global ). Pour cela il nous faut des mesures externes au robot R permettant de déterminer sa position dans .
On veut donc estimer les positions
Méthode angulaire par barycentre
Présentation du problème :
Faisons simple pour commencer. Supposons
un cas en 2D avec trois stations
de références aux positions dans
connues. Ces trois stations sont observables par le robot
visuellement (elles sont peut-être reconnues soit par
vision classique, soit elles émettent un rayonnement
infrarouge par exemple) et sont discernables entre elles.
En d'autre termes le robot les voit et sait affecter une
position à chacune dans le référentiel global
.
Si de plus, R connait son cap (c'est à dire son
orientation par rapport au référentiel
)
grâce par exemple à un magnétomètre, alors, il est capable
de déterminer les anges entre les
et l'axe x du référentiel
Donc on note
cet
angle. Avec les trois angles correspondant à chacune des
stations on est capable de trianguler le robot et
d'estimer sa position.
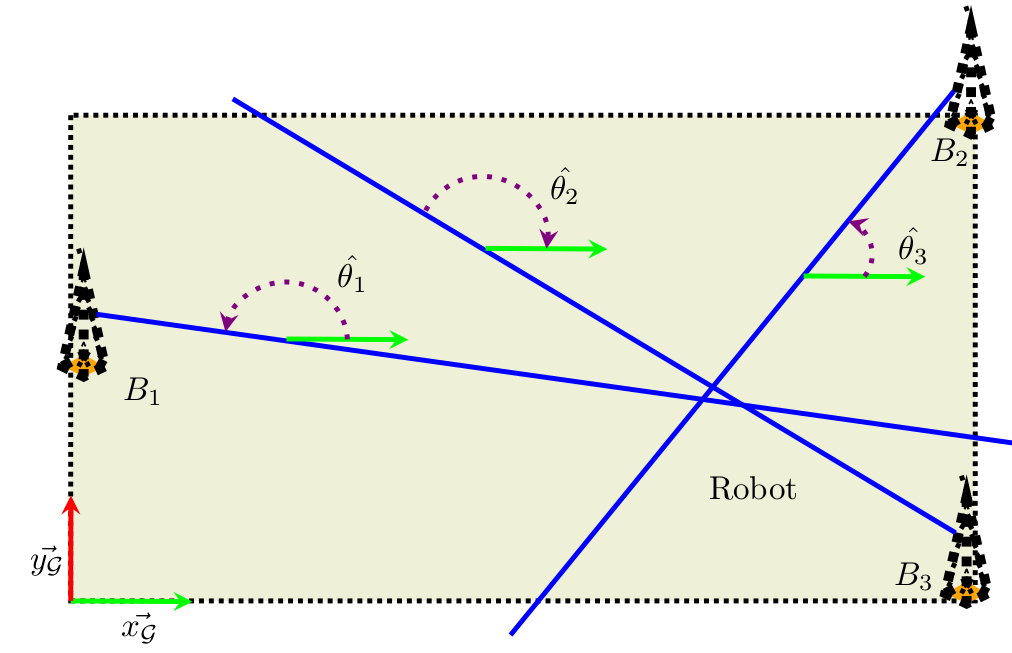
Figure : Illustration du dispositif; Erratum : les
angles ont bien sûr la même convention d'orientation, à
vous de choisir!
Modèle de mesure
On supposera que l'angle
Obtention des points d'intersection : quelques considérations géométriques
Notre objectif est d'estimer là où se
situe le robot. On peut penser, au vu du titre de cette
section, et à juste titre que choisir le point moyen
(l'isobarycentre) des intersections
des droites paramétrés par les angles
On peut appliquer la méthode suivante :
Détermination des équations de droites en coordonnées cartésiennes dans le référentiel global pour chacune des stations de base Chaque point appartenant à une droite respecte la relation : - On peut trouver le coefficient directeur m par sa
définition trigonométrique (la pente de la droite
étant directement liée à
- Ensuite trouver p est facile avec les coordonnées du
point
B i - Détermination des intersections
- On initialise N = 3 (trois intersections a
priori)
- Si les deux droites sont quasiment alignées, il ne faut pas rechercher leur points d'intersections car ces derniers pourraient bien se situer en dehors des limites du terrain dans lequel évolue le robot. Ainsi, pour deux droites et on peut calculer la différence de leur coefficients directeurs et ainsi faire le test :
- Si le test est un succès alors les droites sont quasiment parraléles on ne calcule pas leur intersection on fait N = N -1 et on passe à la droite suivante si il en reste.
- Sinon, on garde N inchangé et on peut calculer l'intersection par :
- Estimation de la position du robot :
On calcule donc l'isobarycentre
(moyenne) des positions et on obtient une position
estimée du robot : Et
voilà nous obtenons un estimé de position avec seulement
des outils d'enseignement secondaire. Un petit essai
s'impose en Python.
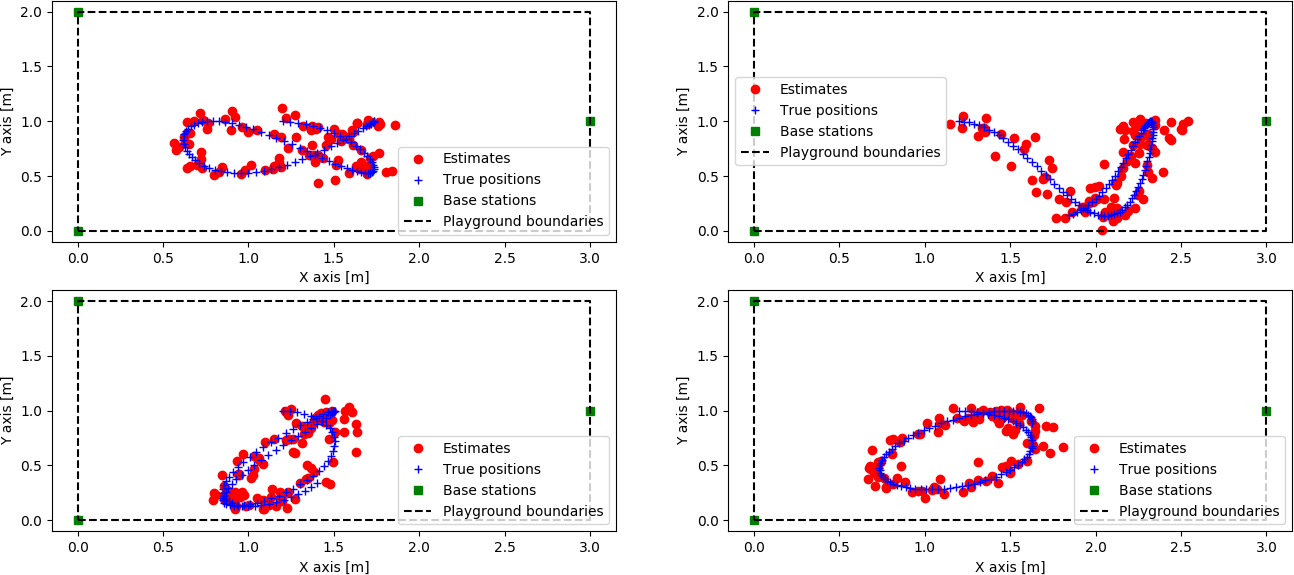
Voici un code
démonstratif avec un générateur de trajectoire de
robot aléatoire. On notera qu'il faut installer python
pour le faire fonctionner ainsi que les bibliothèques pyplot
(pour les graphiques) et numpy
(pour les notions algébriques). On règle le bruit fait sur
l'estimation des angles à
.
L’estimation se déroulant on peut ainsi
calculer l'erreur entre cette dernière et les vraies
positions, on notera cette dernière ainsi :Le
graphique ci-dessous comporte tous les points de ce terme
d'erreur pour les quatre trajectoires ci dessous.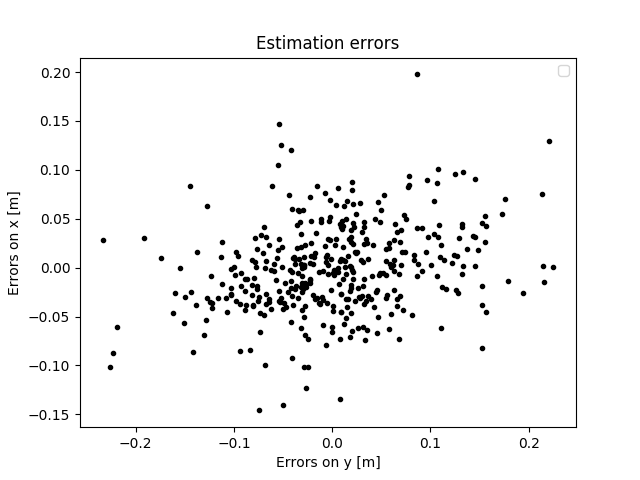
Au vu de la simplicité de l'algorithme, il n'est pas
robuste aux bruits de mesure, et si on augmente trop le
bruit additif sur les angles, le résultat ne se montre
plus satisfaisant. Ainsi, il faut intégrer la cinématique
du robot (ici on prend des "photographies robot à
l'instant t" en supposant le robot fixe et disposant des
trois angles en même temps) afin de lisser l'estimé de
trajectoire.
Méthodes par moindres carrés et filtrage de Kalman
Comme support de ceci, je ne donne pas de version HTML lisible sur navigateur mais... des slides Beamer ce qui est mieux pour les yeux! Je précise que ces supports sont donnés pour la formation qui aura lieu en janvier 2020 au Club Robotique de l'École Centrale de Marseille... E-Gab!- Présentation donnée à l'École Centrale de Marseille [PDF]
- Codes-compagnons pour cette formation plus du bonus! In
English in the text. [Répertoire
Gitlab]
- Bibliothèque en C pour une impémentation sur
micro-contôleur d'un EKF (pas super, c'est moi qui l'ai
codée, mais cela fonctionne). [Répertoire
Gitlab]
- Motion planning (planification de trajectoire)
en robotique (utile pour mieux comprendre la
cinématique) [PDF]
- Page contenant mes travaux de
recherche pour les plus téméraires.
Haut de page